
|
mobile_sensor package from ros2-android-sensor-bridge repomobile_sensor |
Package Summary
| Tags | No category tags. |
| Version | 0.0.0 |
| License | TODO: License declaration |
| Build type | AMENT_CMAKE |
| Use | RECOMMENDED |
Repository Summary
| Description | Mobile Sensor Bridge for ROS2 transforms your android smartphone into a plug‑and‑play sensor suite—streaming camera, spatial pose data, and bidirectional audio into ROS2 topics via rclnodejs. Whether you’re prototyping perception pipelines or building voice‑driven robots, the package lets you leverage your phone’s sensors without extra hardware. |
| Checkout URI | https://github.com/vedantc2307/ros2-android-sensor-bridge.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-20 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Package Description
Additional Links
Maintainers
- vedant
Authors
Mobile Sensor Bridge for ROS2
This package provides a ROS2 node that streams sensor data directly from an Android smartphone, including JPEG camera streaming (up to 30 FPS), spatial pose tracking, and bidirectional audio communication.
You can use this package in two ways:
Overview
Robotics prototypes often require multiple sensors, each needing calibration and integration. This package transforms an Android phone into a comprehensive sensor suite by publishing its sensor data as ROS2 topics. The node is implemented using rclnodejs, enabling seamless ROS2 integration within a JavaScript environment.
Features
-
Camera Stream: Publishes mobile camera frames as
sensor_msgs/CompressedImage - Native ROS2 Interface: Direct integration with ROS2
-
Spatial Pose Tracking: Streams WebXR spatial position and orientation as
geometry_msgs/Pose - Speech Interface: Bidirectional audio with speech-to-text and text-to-speech (wake word: “Robot”)
- Selectable Sensors: Enable or disable individual sensors as needed
Prerequisites
- ROS2 (tested with Humble)
- Node.js (v20+ recommended; tested with v22.14.0)
- npm (v8+; tested with v10.9.2)
- Modern smartphone with WebXR support (for AR features)
- OpenSSL (for certificate generation)
Installation
- Clone the repository to your ROS2 workspace
srcdirectory:
cd <ros2_workspace>/src/
git clone https://github.com/VedantC2307/ros2-android-sensor-bridge.git mobile_sensor
- Install Node.js dependencies:
cd mobile_sensor
npm install
[!NOTE] Run
npm installbefore building the package with colcon.
- Generate SSL certificates (required for secure access):
cd <ros2_workspace>/src/mobile_sensor/src
chmod +x generate_ssl_cert.sh
./generate_ssl_cert.sh
- Build the ROS2 package:
cd <ros2_workspace>
colcon build --packages-select mobile_sensor
- Source the workspace:
source install/setup.bash
Usage
- Launch the mobile sensor node:
ros2 launch mobile_sensor mobile_sensors.launch.py
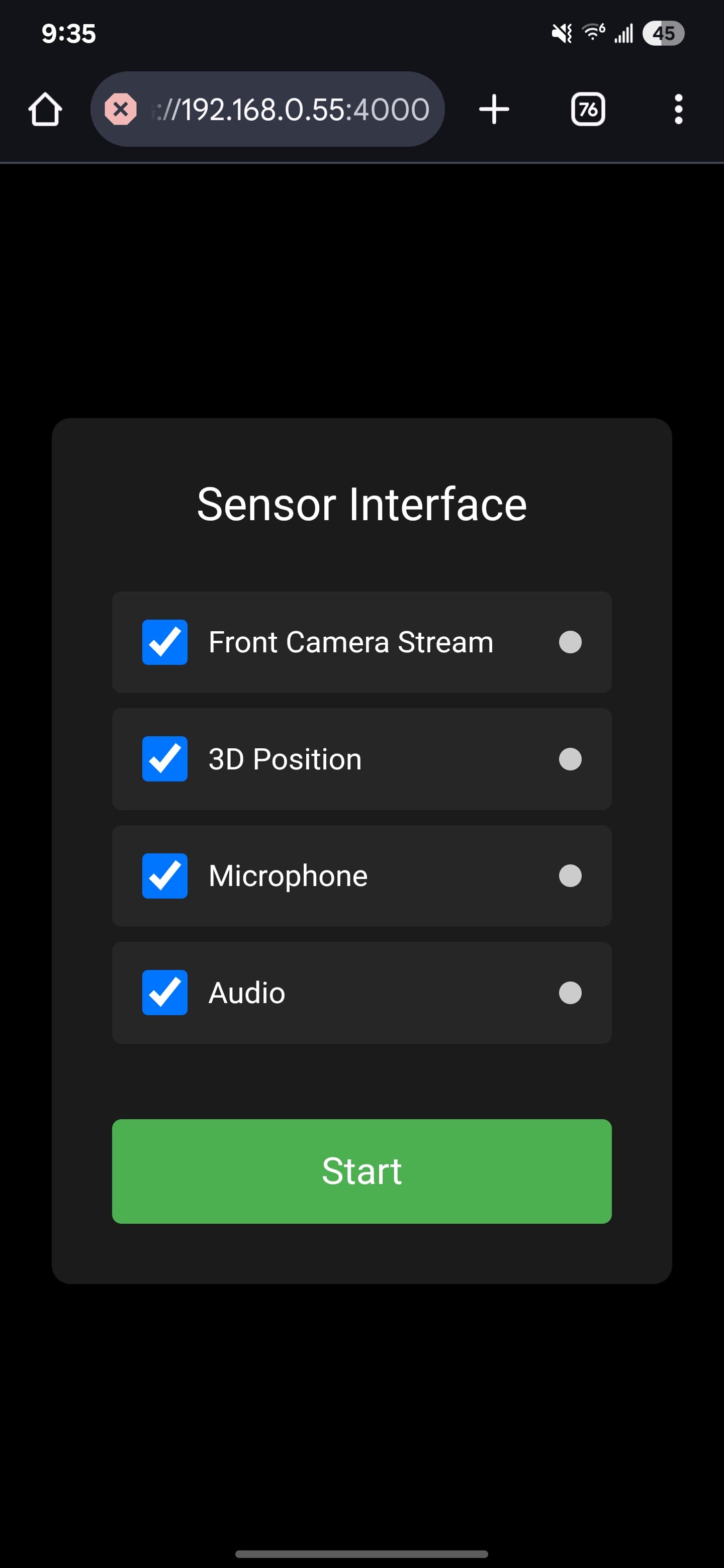
- Access the web interface on your mobile device:
- Open a browser on your mobile device and navigate to
https://<your_computer_ip>:4000 - Accept the self-signed certificate warning
- Grant permissions for camera, microphone, and AR features
- Select desired sensors and click “Start”
- Open a browser on your mobile device and navigate to
ROS2 Topics
The package publishes the following topics:
-
/camera/image_raw/compressed(sensor_msgs/CompressedImage): Camera images -
/camera/camera_info(sensor_msgs/CameraInfo): Camera calibration data [testing] -
/mobile_sensor/pose(geometry_msgs/Pose): AR pose data -
/mobile_sensor/speech(std_msgs/String): Transcribed speech
To send text-to-speech messages to the device, publish to:
-
/mobile_sensor/tts(std_msgs/String): Text to be spoken
Docker Deployment
For Docker deployment, see Docker instructions.
- Build and start the Docker container:
docker-compose build
docker-compose up
- Access the web interface on your mobile device as described in the Usage section.
Feature Status
Current feature implementation status:
- Camera Stream – Stable; JPEG camera streaming
- Camera Selection Flexibility – In development; Add support to use rear or front camera
- ROS2 Topic Integration – Stable; all core topics are fully supported
- Device Pose Tracking – Experimental; may show reduced accuracy in visually sparse environments
- Speech-to-Text Interface – Experimental; works best in quiet settings. Wake word customization planned
- Text-to-Speech Interface – Experimental; .wav file support planned for more natural voice output
- Multi-Device Support – Beta; Use camera from one smartphone and audio/microphone from another
- Dependency Management – Planned; add rosdep or similar for improved robustness
Note: Feature status is current as of April 2025. See GitHub issues for the latest updates.
Troubleshooting
Mobile Browser Shows ERR_EMPTY_RESPONSE
If the UI loads fine on your laptop but your mobile browser shows ERR_EMPTY_RESPONSE, this is usually a network visibility or firewall issue. Try the following steps:
-
Confirm Both Devices Are on the Same Network:
- Ensure your phone and computer are connected to the same Wi-Fi network.
-
Disable the Firewall Temporarily:
- On Ubuntu, run:
sudo ufw disable - Try accessing the server again from your phone. If it works, the firewall was blocking the connection. Re-enable it using
sudo ufw enableand add a rule to allow traffic on port 4000.
- On Ubuntu, run:
Let us know if these steps help or if you’re still having issues after trying them!
Contributing
Contributions are welcome! Please feel free to submit a Pull Request.
Wiki Tutorials
Package Dependencies
| Deps | Name |
|---|---|
| ament_cmake | |
| ament_lint_auto | |
| ament_lint_common |