Repository Summary
| Description | A robotics hardware platform for the integration sensors and end effectors into a common platform. |
| Checkout URI | https://github.com/facebookresearch/digit-plexus.git |
| VCS Type | git |
| VCS Version | main |
| Last Updated | 2025-04-24 |
| Dev Status | UNKNOWN |
| CI status | No Continuous Integration |
| Released | UNRELEASED |
| Tags | No category tags. |
| Contributing |
Help Wanted (0)
Good First Issues (0) Pull Requests to Review (0) |
Packages
| Name | Version |
|---|---|
| plexus_pkg | 0.0.1 |
README
Meta Digit Plexus
A robotics hardware platform for the integration sensors and end effectors into a common platform.
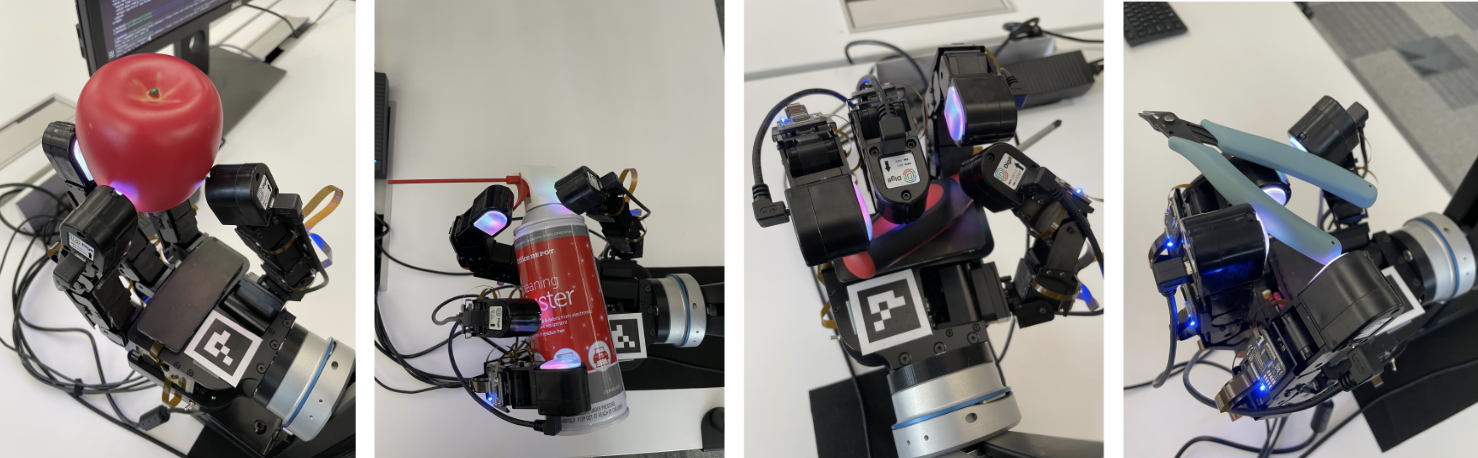
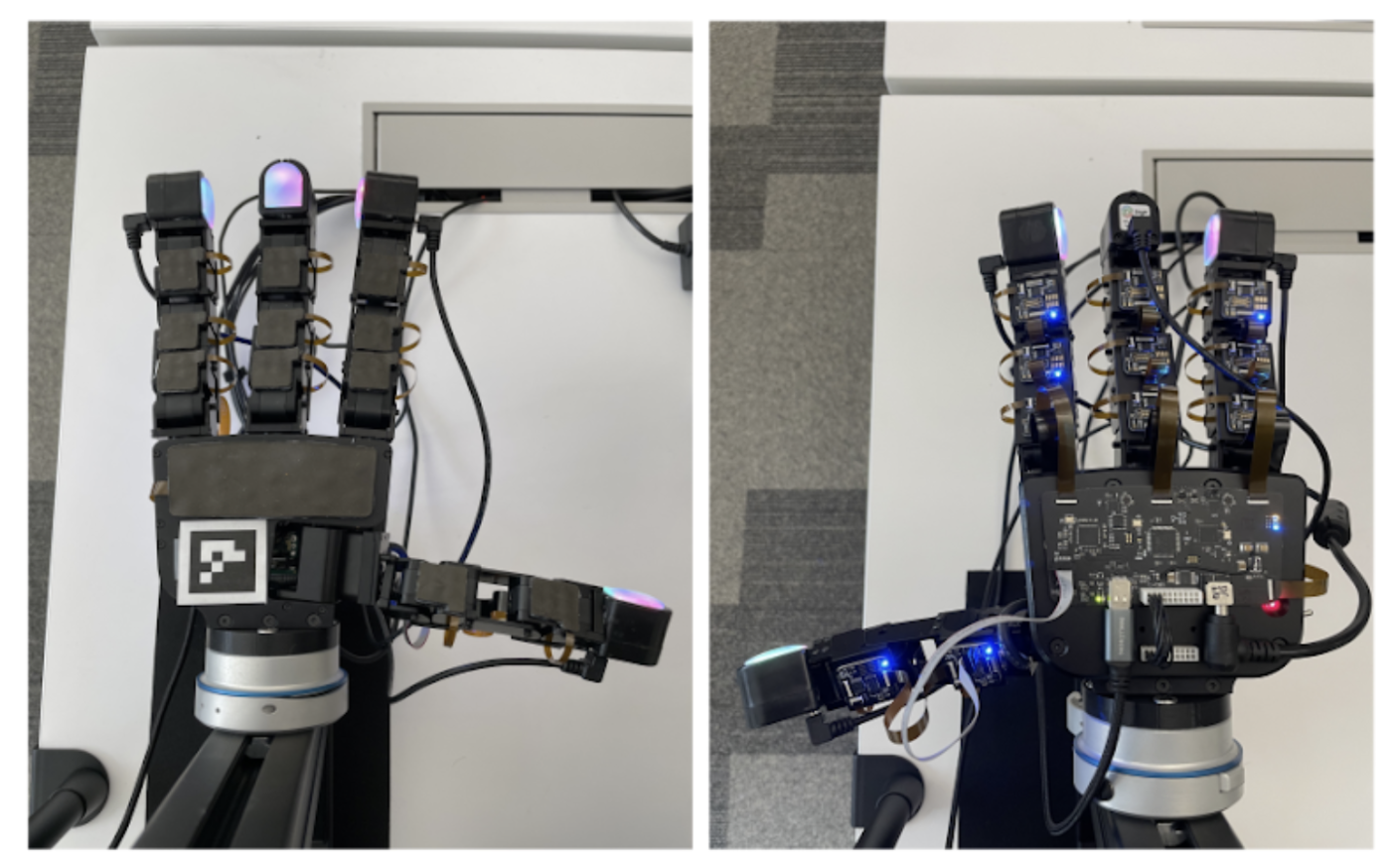
Digit Plexus aims to create a standardized platform that provides a hardware-software solution to integrate tactile sensors on any robot hand. The platform interfaces vision-based and skin-based tactile sensors like Digit, Digit 360, and ReSkin across fingertips, fingers, and palm, into control boards to encode all data to a host computer. The software integration and hardware components of the platform allows for seamless data collection, control and analysis over a single cable.
Standardized Platform
We propose and implement variations of the Digit Plexus standardized architecture found here
The advanced variation of the architecture allows for a modular implementation to support any custom sense patch configuration where each link is connected via USB to the hand logic motherboard.
Additionally, actions may be provided to a robotic end effector or hand via multiple methods such as: CAN, USB, I2C.
Partnerships
We have partnered with Wonik Robotic’s to develop a next generation Allegro Hand based off of the Digit Plexus platform. For early access, interest may be expressed through this form.
Usage
Design files for basic (rigid based) and advanced (flex) are found in the hardware folder of the repository. Furthermore, we provide the Altium Designer ECAD templates which can be used to create a custom sensor patch configuration for the hand, links or fingertips.
Sense and Hand Patch
Mechanical sense patch files for 3D printing or mold design are found in the mechanical folder. Depending on the application, or the preferred sensing modality, you may use a similar technique to ReSkin (magnetic particulate infused silicone) or an alternative composition of silicone for forming the sensing surface interacting with the sense patch. We recommend attaching the sense patches to the base end effector with a 3M 300LSE double sided adhesive.
Fingertip Sensing
The Digit Plexus platform supports Digit tactile sensors as well as any alternative sensor based on a USB2.0 connection as shown here.
🛠️Installation and setup
Digit Plexus contains a USB hub device which will enumerate all devices connected to the base.
Currently, this supports the Allegro Hand and the next generation Allegro Hand in partnership with Meta.
Digit Plexus provides a new interface for controlling the Allegro Hand directly through a Python interface, as well provides a ROS2 integration.
Installation and usage instructions are found here.
Related Works using Digit Plexus plartform
- Neural feels with neural fields: Visuo-tactile perception for in-hand manipulation, Sudharshan Suresh et al.
- Learning In-Hand Translation Using Tactile Skin With Shear and Normal Force Sensing, Jessica Yin et al.
License
This project is licensed under LICENSE.
CONTRIBUTING
Contributing to Digit Plexus
We want to make contributing to this project as easy and transparent as possible.
Pull Requests
We actively welcome your pull requests.
- Fork the repo and create your branch from
main. - If you’ve added code that should be tested, add tests.
- If you’ve changed APIs, update the documentation.
- Ensure the test suite passes.
- Make sure your code lints.
- If you haven’t already, complete the Contributor License Agreement (“CLA”).
Contributor License Agreement (“CLA”)
In order to accept your pull request, we need you to submit a CLA. You only need to do this once to work on any of Meta’s open source projects.
Complete your CLA here: https://code.facebook.com/cla
Issues
We use GitHub issues to track public bugs. Please ensure your description is clear and has sufficient instructions to be able to reproduce the issue.
Meta has a bounty program for the safe disclosure of security bugs. In those cases, please go through the process outlined on that page and do not file a public issue.
License
By contributing to Digit-Plexus, you agree that your contributions will be licensed under the LICENSE file in the root directory of this source tree.